
Para descargar los archivos de forma directa, sin que los abra el navegador, pulsar botón derecho del ratón sobre el enlace y en el menú que se abre pulsar "Guardar destino como..."
Esto sólo es válido para los que no están en el Mega, los que si están hay que seguir el enlace.
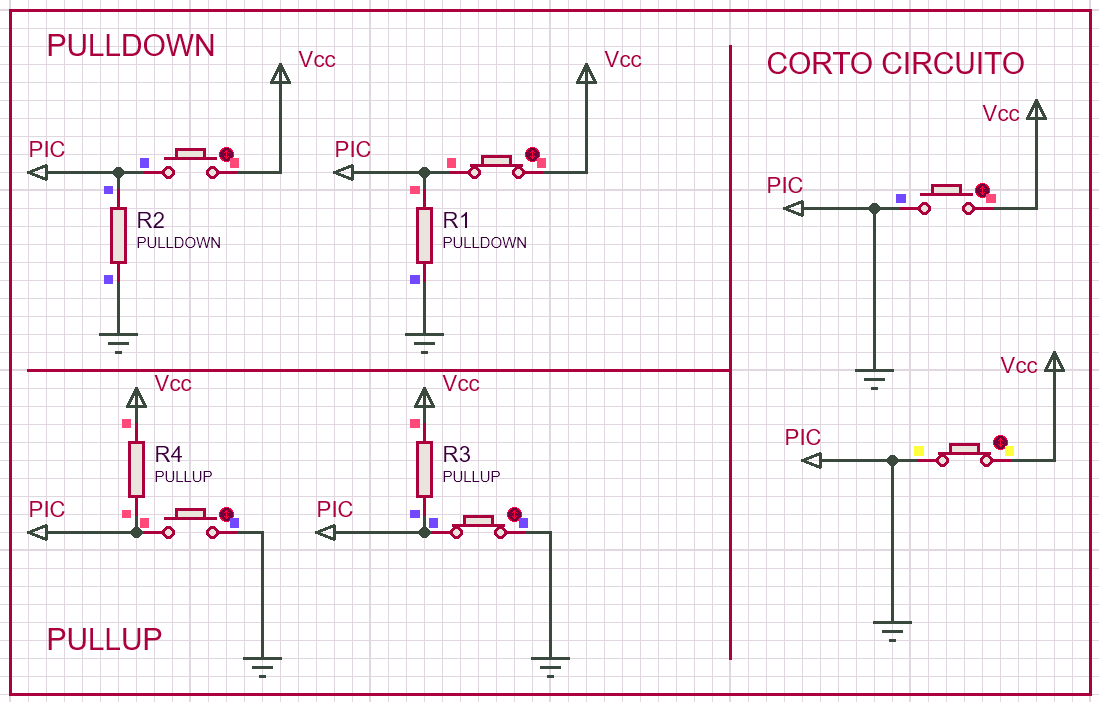
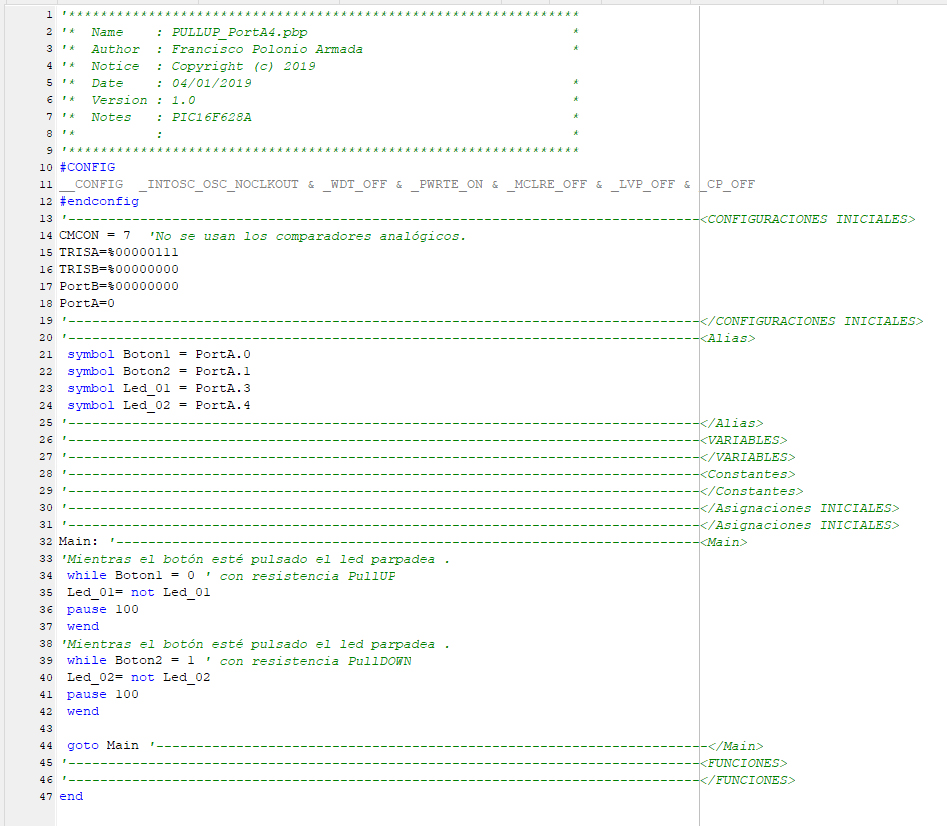
Las resistencias PULLUP y PULLDOWN son resistencias que se ponen en los circuitos para mantener un estado de tensión alto o bajo cuando el circuito está en reposo, esto es, cuando no activamos la entrada. Un caso especial son las PULLUP en las salidas open drain como el pin 3 del PIC PIC16F628A que corresponde al RA4.
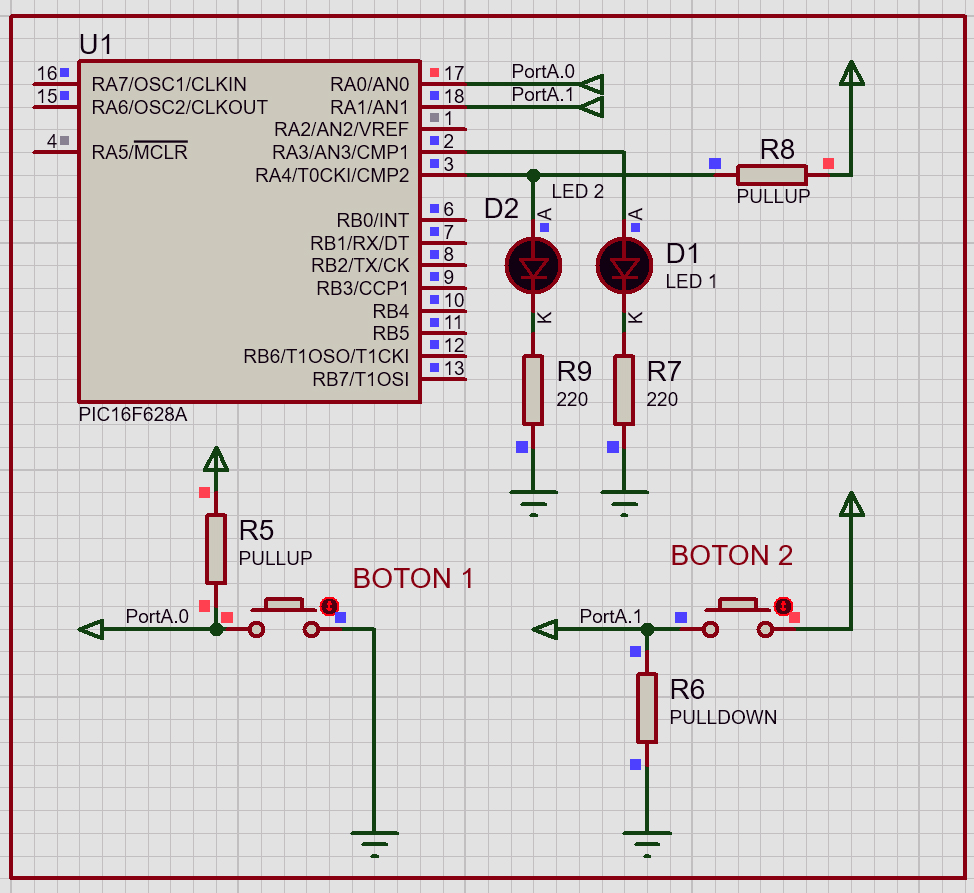
Para asegurarnos que el pin de entrada al PIC está en un estado alto cuando no se ha pulsado el botón le ponemos las resistencias PULLUP como se indica en la imagen. La resistencia tiene que ser de valor elevado, entre 4,7K y 10K, para que la corriente que pasa por ella no sea muy grande, ya que al presionar el pulsador, pasará por ella una corriente igual a Vcc/R . Algunos autores indican que se pongan resistencias de 1K, pero esto supone un consumo de 5mA, que para circuitos a pilas es excesivo.
Normalmente los botones se ponen con resistencias PullDawn para minimizar el consumo. Un caso especial es el botón de reset externo para el PIC, que lleva resistencias PullUP necesariamente, ya que el reset se produce al llevar este pin a tierra y para que funcione debe estar en potencial alto.
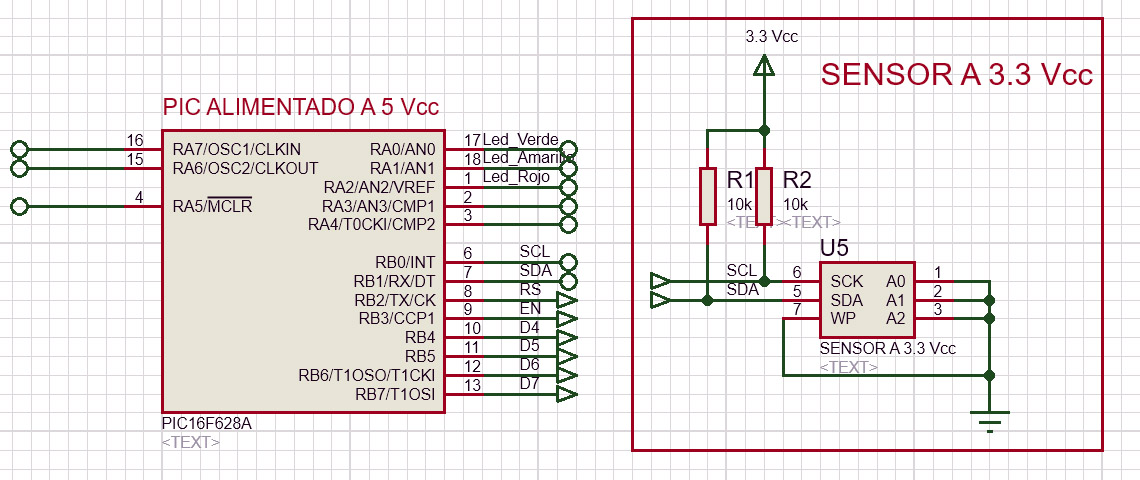
Otra de las utilidades de las resistencias PULLUP es la de permitir que el PIC controle con sus salidas tensiones que están por debajo de su tensión de alimentación.
Imaginamos que tenemos nuestro PIC alimentado a 5Vcc y tenemos que comunicarlo con un sensor que funciona a 3.3Vcc. Si para enviarle un valor 1 al sensor activamos la salida correspondiente de nuestro PIC
estamos enviandole 5 Vcc al sensor y casi con toda seguridad, rompiéndolo.
Pues bien, si ponemos resistencias PullUp en por ejemplo el pin RB0 conectadas a 3.3Vcc, tenemos la opción de poner el Pin a cero haciendo que TrisB.0=0 y PortB.0=0, como estamos acostumbrados.
Pero Para ponerlo a 3.3 Vcc tendremos que poner el Pin RB0 como entrada (TrisB.0=1), lo que lo pone en un estado de alta impedancia y permite que haya 3.3 Vcc provenientes de las PullUp en ese Pin y en la linea que tiene conectada.
Así, si mantenemos PortB.0= 0 y alternamos TrisB.0=0 y TrisB.0=1, a intervalos regulares, estamos enviando una onda cuadrada con una tensión de 3.3V a nuestro dispositivo.
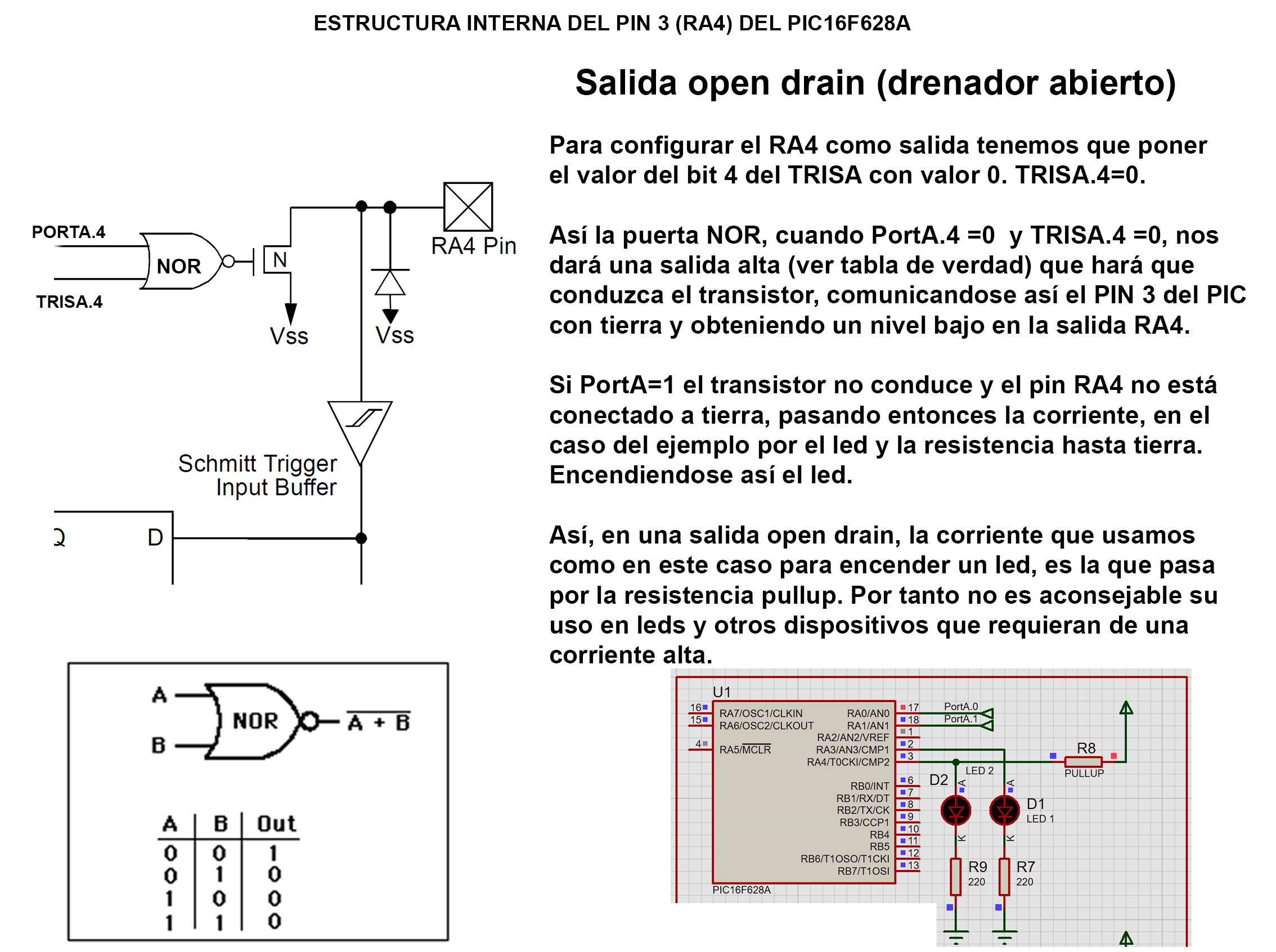
El caso especial de las PULLUP en las salidas open drain tiene otro motivo. Las salidas open drain no suministran corriente, lo que hacen es derivar a tierra la entrada, con lo que la resistencia PULLUP que se ponga en esta salida tiene que ser adecuada a la corriente máxima que es capáz de soportar la salida, que suele rondar los 20mA y a la vez suficiente para activar el dispositivo que conectemos a la salida. Por esto es aconsejable siempre que el diseño lo permita usar el PuertoA.4 como entrada en vez de salida.
Son las que se conectan habitualmente a los botones. No consumen nada en estado de reposo y nos garantizan el estado bajo en el PIN de entrada.
Puenden verse las formas de programar ambos tipos de entradas en el ejemplo adjunto: Basico PULLUP.zip
Bueno, hay que prestar atención a los botones para que cuando se pulsen la corriente que dejen pasar esté controlada por resistencias. El no prestar atención a esto nos puede hacer romper algún componente o hacer que explote una batería. En el mejor de los casos el circuito simplemente no funcionará y saltará la protección contra cortocircuitos de nuestra fuente.
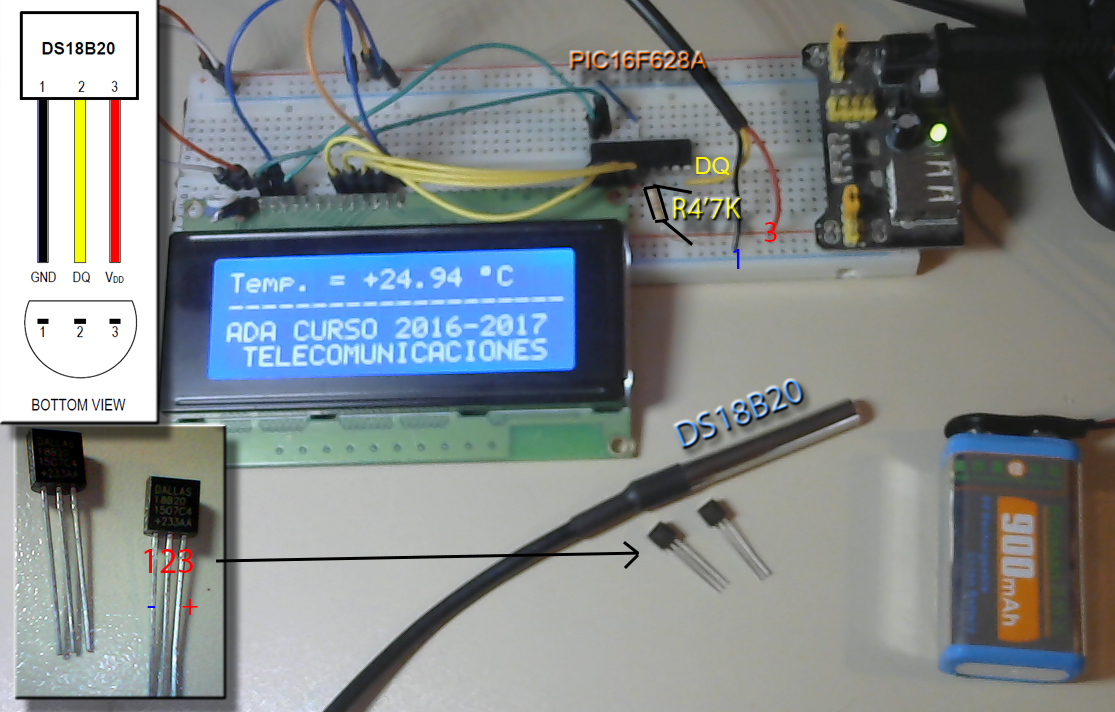
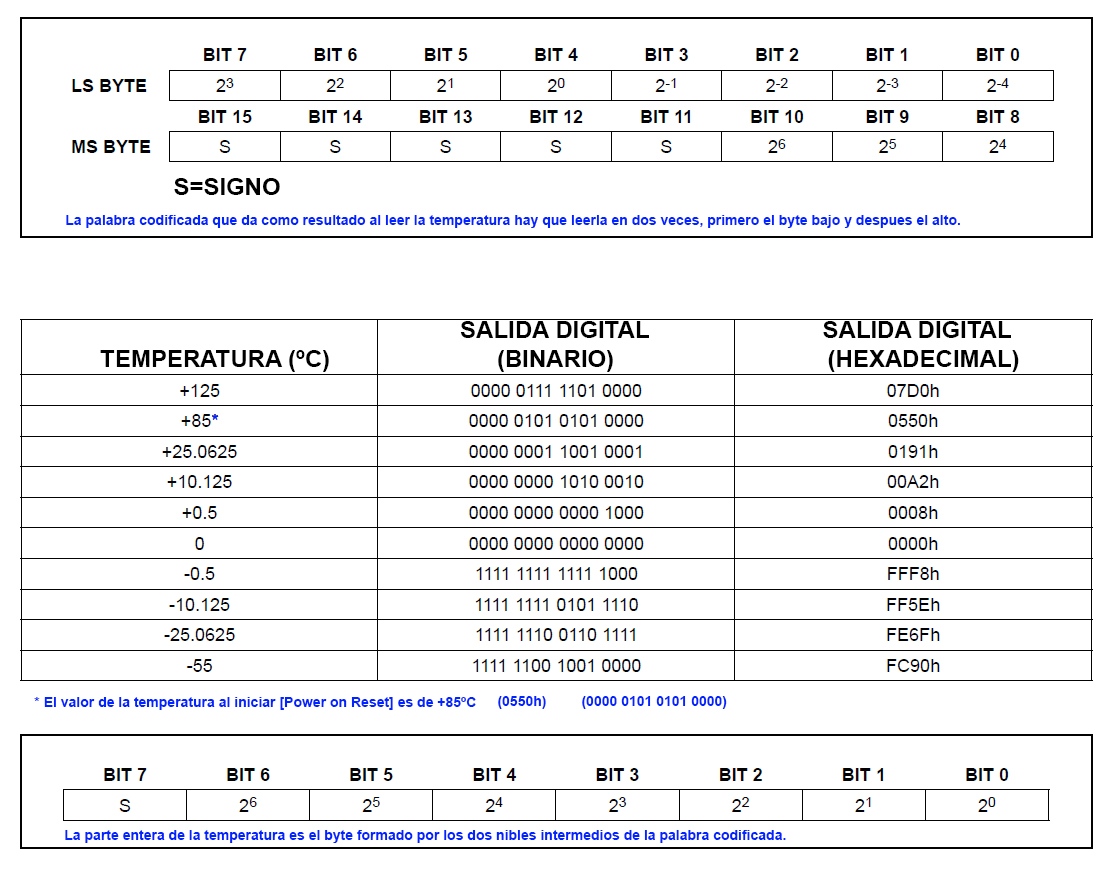
Hemos probado el sensor de temperatura DS18B20, que se caracteríza por tener una salida digital con el protocolo standar 1-wire. Esta sonda mide temperaturas con una precisión de 0.0625 grados y un error máximo de 2 grados en el rango de [-55 a 125ºC] y de 0,5 grados en el rango de [-10 a +85].
Las aplicaciones normales de una sonda de temperatura son las de hacer de termostato en cualquier circuito que requiera de una regulación de temperatura.
El uso de una sonda de temperatura digital está más limitado que el de una sonda analógica, ya que para usarla es necesario un microcontrolador que lea su valor. En el siguiente apartado veremos como se hace esto desde un PIC y un ATMEL en los lenguajes que estamos estudiando.
He incluido un vídeo con una explicación básica de lo que es el circuito, la hoja de datos y el programa del PIC.
He incluido también el programa del PIC tanto el fuente como el compilado.

Es un circuito integrado que nos sirve para controlar corrientes eléctricas de varios amperios desde una salida TTL.
Vamos a hacer unas pruebas con el driver de corriente L293 y el L298 y a explicar sus princípios de funcionamiento. En un princípio el vídeo que he puesto es sobre su funcionamiento y un vídeo con una simulación en proteus de un coche con dos motores en las ruedas traseras y una rueda loca.
Posteriormente haré una prueba real sobre el banco de trabajo y veremos como se puede controlar desde un microcontrolado para regular la velocidad de los motores.

El diodo de 4 Pin con cátodo común es uno de los muchos diodos que existen en el mercado para RGB, este diodo usa niveles de tensión entre sus pin para generar los distintos colores. Por su estructura requiere para su visualización algún objeto que haga de difusor de los colores, en este caso una pelota de PingPong.