
Componentes necesarios para la realización.
Teoría básica.
Hemos realizado este proyecto como iniciación a la lectura de señales de radiofrecuencia con PIC.
El proyecto en un princípio se daba por terminado, no se pretendía más, aunque en el programa en PICBASIC están implementadas funciones para ver la frecuencia, las longitudes de los pulsos y alguna cosa más. En este año vamos a depurar el proyecto y hacerlo un poco más completo.
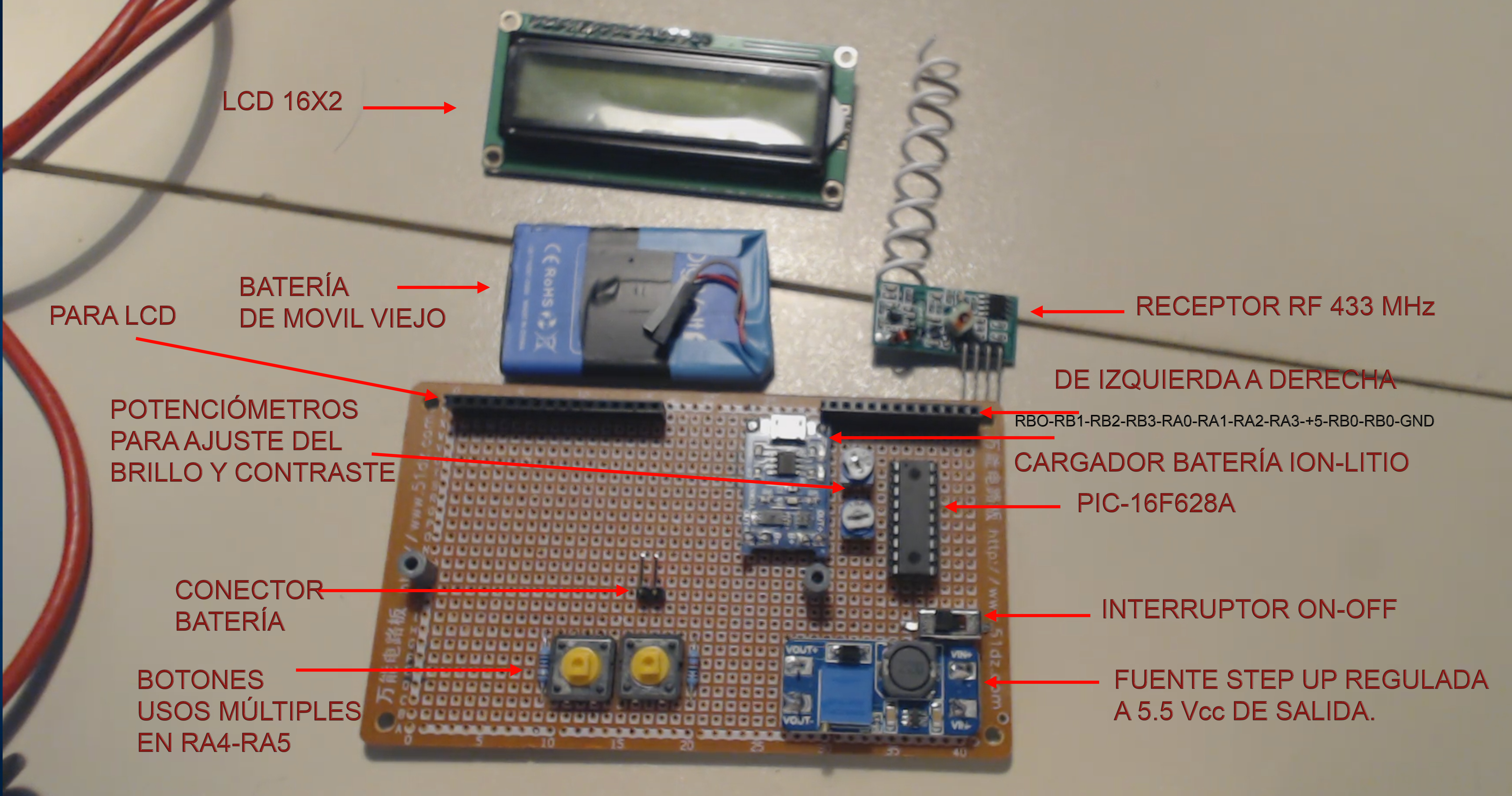
La finalidad de este proyecto es poder comprobar los circuitos que se hagan en la práctica con el PT2262- PT2272.
En este curso se implementará una placa impresa para este circuito, que en su versión de pruebas se puede hacer fácilmente en una Protoboard.
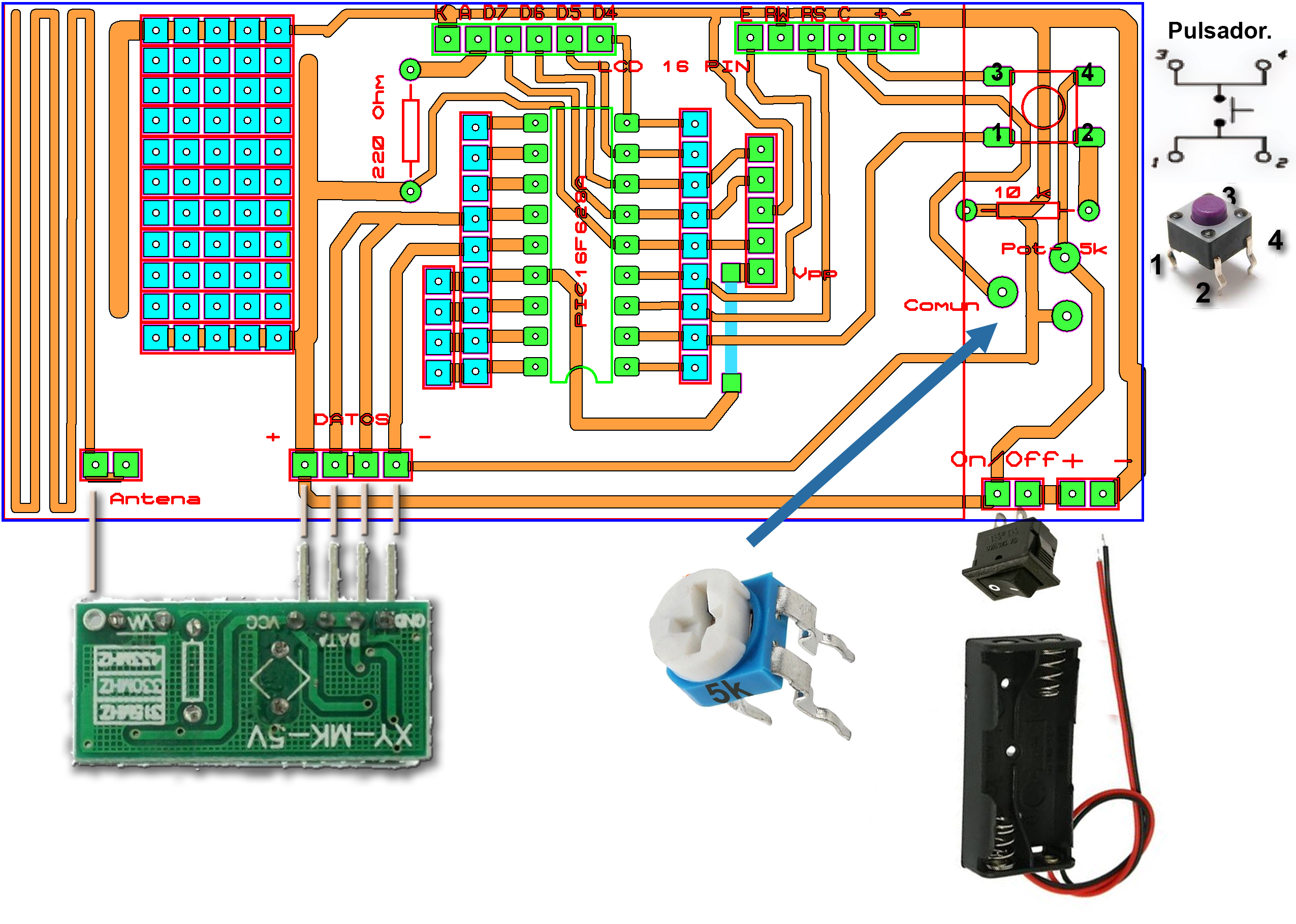
Los puntos a taladar en la placa para el lector son los verdes, los azules son por si alguien se quiere hacer una placa de usos múltiples.
Los fotolitos, código Hex y PBP se pueden descargar de la zona de descargas de esta ficha.
 | VIDEO: LECTOR DE CÓDIGOS PT2262 (FUNCIONAMIENTO) |
Componentes necesarios para la realización.
Teoría básica.
Esta práctica no ha llegado a pasar del primer prototipo beta, sólo se probó el sofware de detección de obstáculos en una plataforma estandar. Este curso intentaremos, con el uso de la impresora 3d hacer todos los sistemas mecánicos y construir un dispositivo operativo.
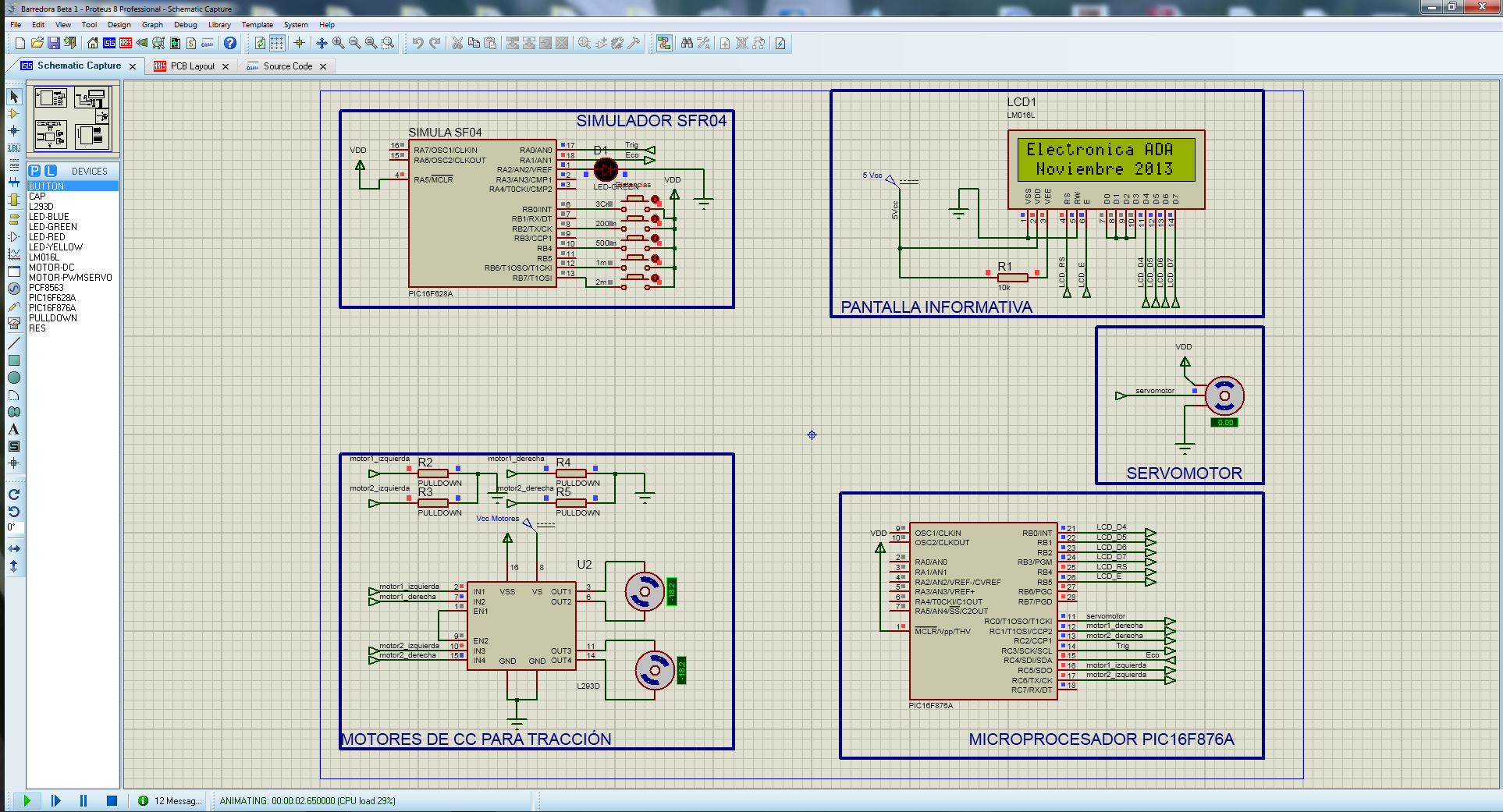
El proyecto en un inicio constaba de un micro PIC16f876A que controlaba un servomotor sobre el que va situado el sensor SRF04 medidor de distancias por ultrasonidos encargado de detectar obstaculos. Dos motores de corriente continua que se controlaran con el IC L293B/D por medio de pulsos PWM para poder controlar la velocidad de movimiento. Y un LCD de 2 lineas por 16 caracteres que nos servirá para mostrar lo que está haciendo el Robot.
Esta práctica requiere para su realización de la construcción de un sistema de escobillas que sea capaz de barrer el suelo por el que pase el vehículo y un sistema de almacenamiento de la suciedad que recoja.
La idea original era simular las barredoras que hay en el mercado, incluso usando repuestos de ellas para los utiles de limpieza. Actualmente en Aliexpress se pueden encontrar todos los repuestos por menos de un euro, sólo buscando la palabra "Roomba" que es una marca comercial.
La parte física intentaremos terminarla en este curso e intentaremos tener un aparato completo y funcional.
El proyecto, al ser un poco largo se puede terminar si a alguien le interesa, aunque el curso haya terminado.
Componentes necesarios para la realización.
Teoría básica.
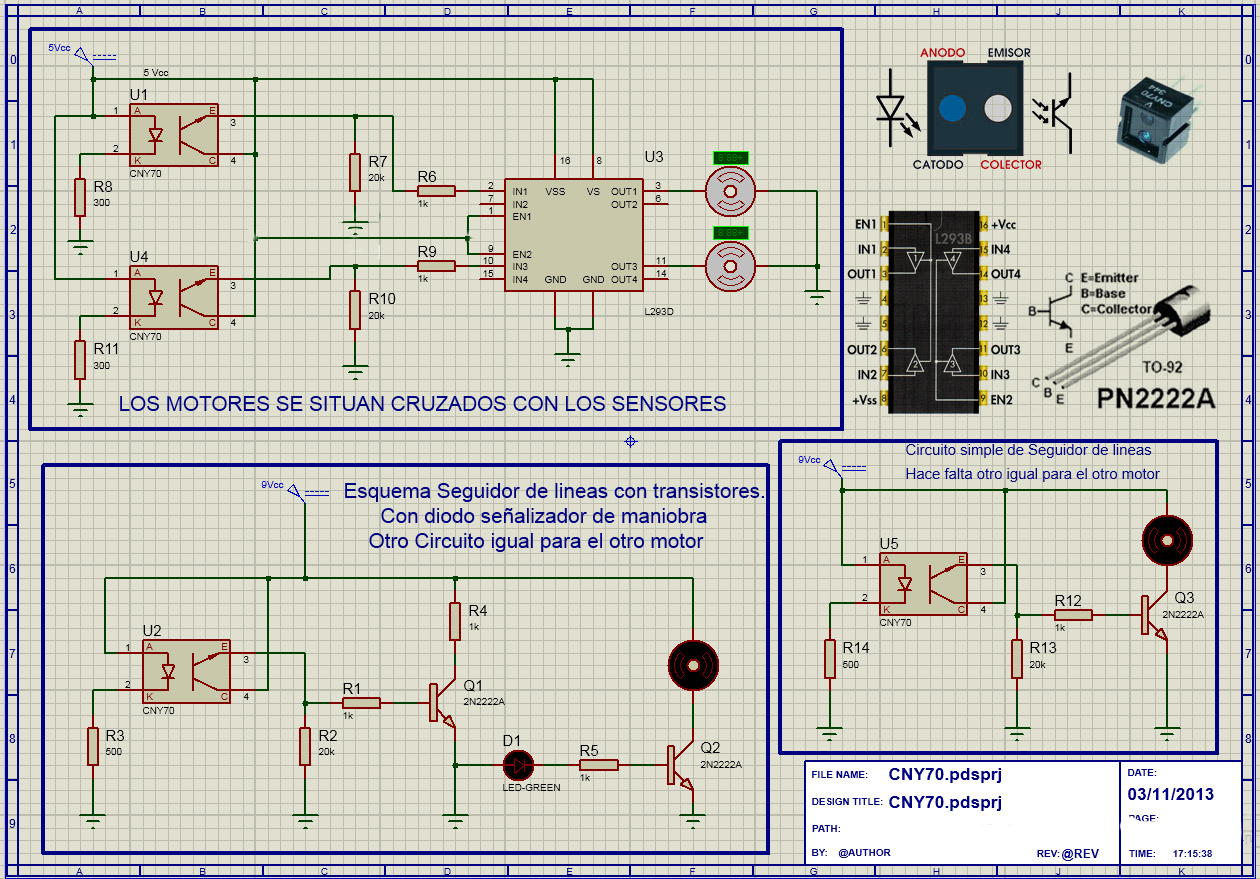
Proyecto de electrónica analógica que consiste en un vehículo que puesto sobre una linea blanca o negra es capaz de seguirla sin salirse de ella.
El proyecto ha sido modificado y he hecho un vehículo con el esquema del L293 y de sensores de reflexión he usado el TCRT5000, que es similar al CNY70 pero más barato. (La hoja de datos la podeis ver en Descargas)
Componentes necesarios para la realización.
Teoría básica.
Hacer un dispositivo que sea capaz de orientarse hacia el punto más luminoso de su entorno.
Vamos a modificar la práctica original para usar comparadores de tensión en la calibración de los sensores, lo que nos permitirá hacer un dispositivo microcontrolado y otro que no lo esté y que ambos funcionen de forma similar
Esta práctica es básica, no hay problema en meter cambios y mejoras. Se puede por ejemplo usar un comparador para los sensores, ya que veremos como calibrar los sensores analógicos con comparadores de tensión, que es la forma más eficáz de usarlos con entradas digitales. Otra utilidad del seguidor de luz puede ser un seguidor de luz para paneles solares. Para que siempre mire al sol.
Todo lo que se os ocurra podeis plantearlo y muy gustosos os ayudaremos a llevarlo a buen fin.
Componentes necesarios para la realización.
Teoría básica.
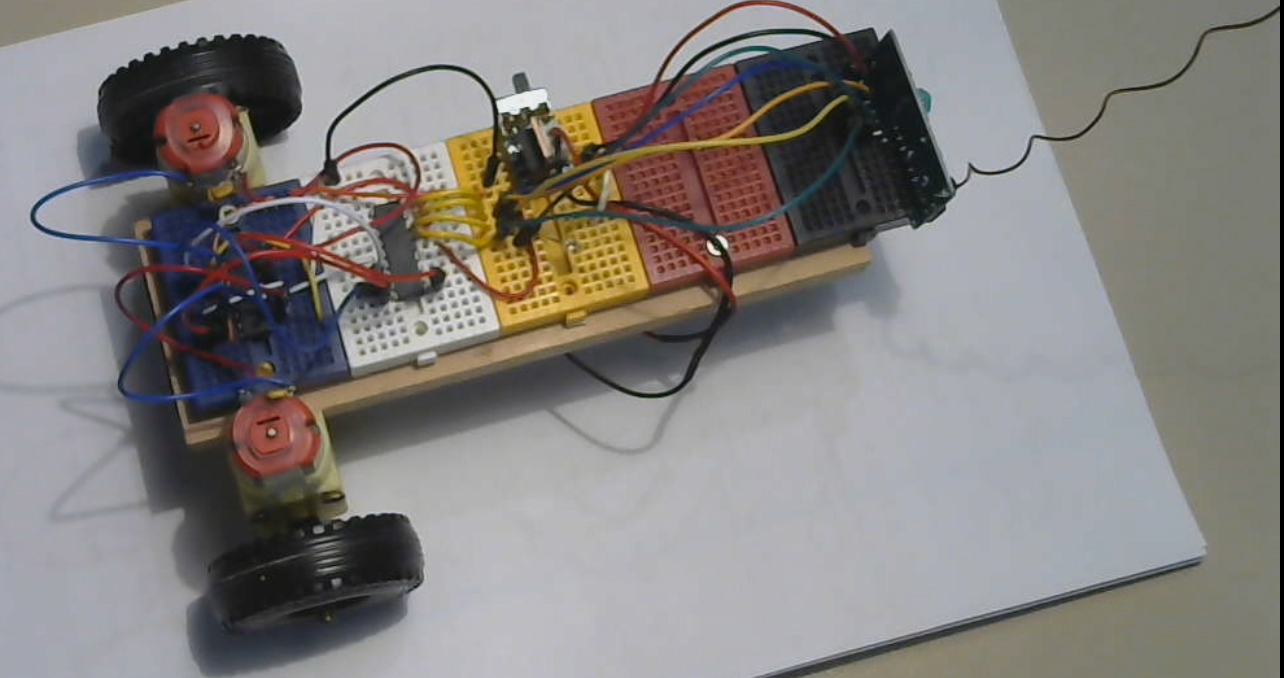
Hacer una plataforma que se desplace con motores y que nos sea útil para realizar distintos montajes con sensores.
En inicio haremos que los motores de esta plataforma se muevan con un mando a distancia por radiocontrol.
Se hará un vehículo que se desplace cuando se le den ordenes desde un mando a distancia radiocontrolado
| VIDEO: VEHÍCULO CONTROLADO POR RADIOFRECUENCIA |
Componentes necesarios para la realización.
Teoría básica.
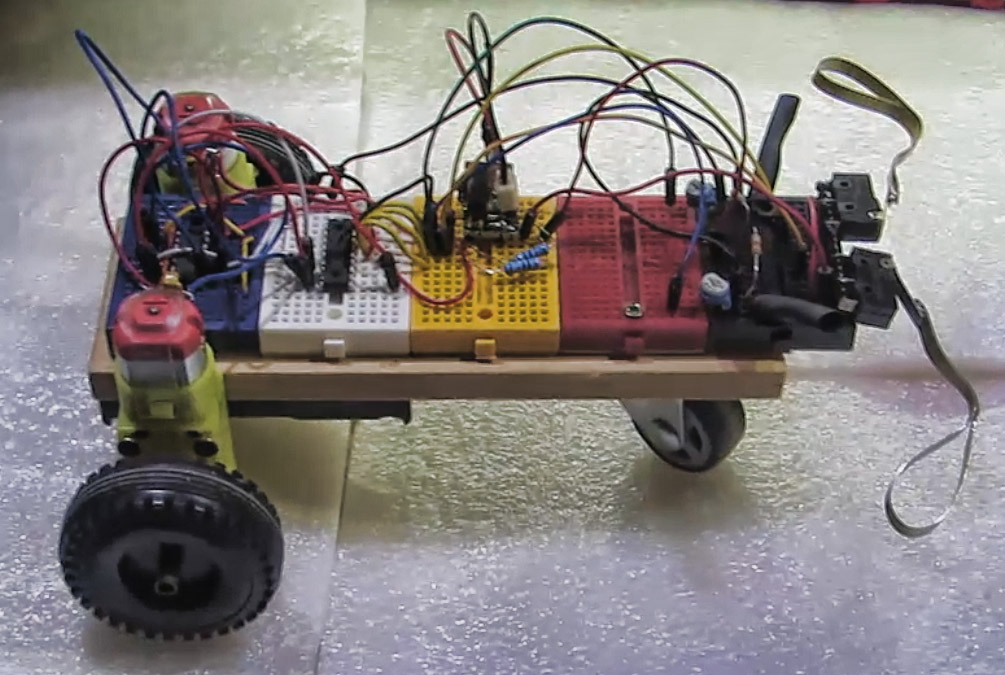
Con la plataforma del vehículo de radiocontrol sustituimos las entradas del receptor RF por sensores de luz e impacto.
Los sensores de luz actuarán igual que los de impacto en cada uno de los lados, por lo que en la programación se tendrá en cuenta nada más que una entrada para cada pareja de sensores luz-impacto de cada lado.
En la zona de descargas se ha incluido un programa PBP para la prueba del giro de los motores de esta plataforma.
El vehículo será autónomo y se moverá contínuamente en línea recta mientras no tenga obstáculos ni luz fuerte en sus sensores.
| VIDEO: VEHÍCULO QUE HUYE DE LA LUZ |
Componentes necesarios para la realización.
Teoría básica.
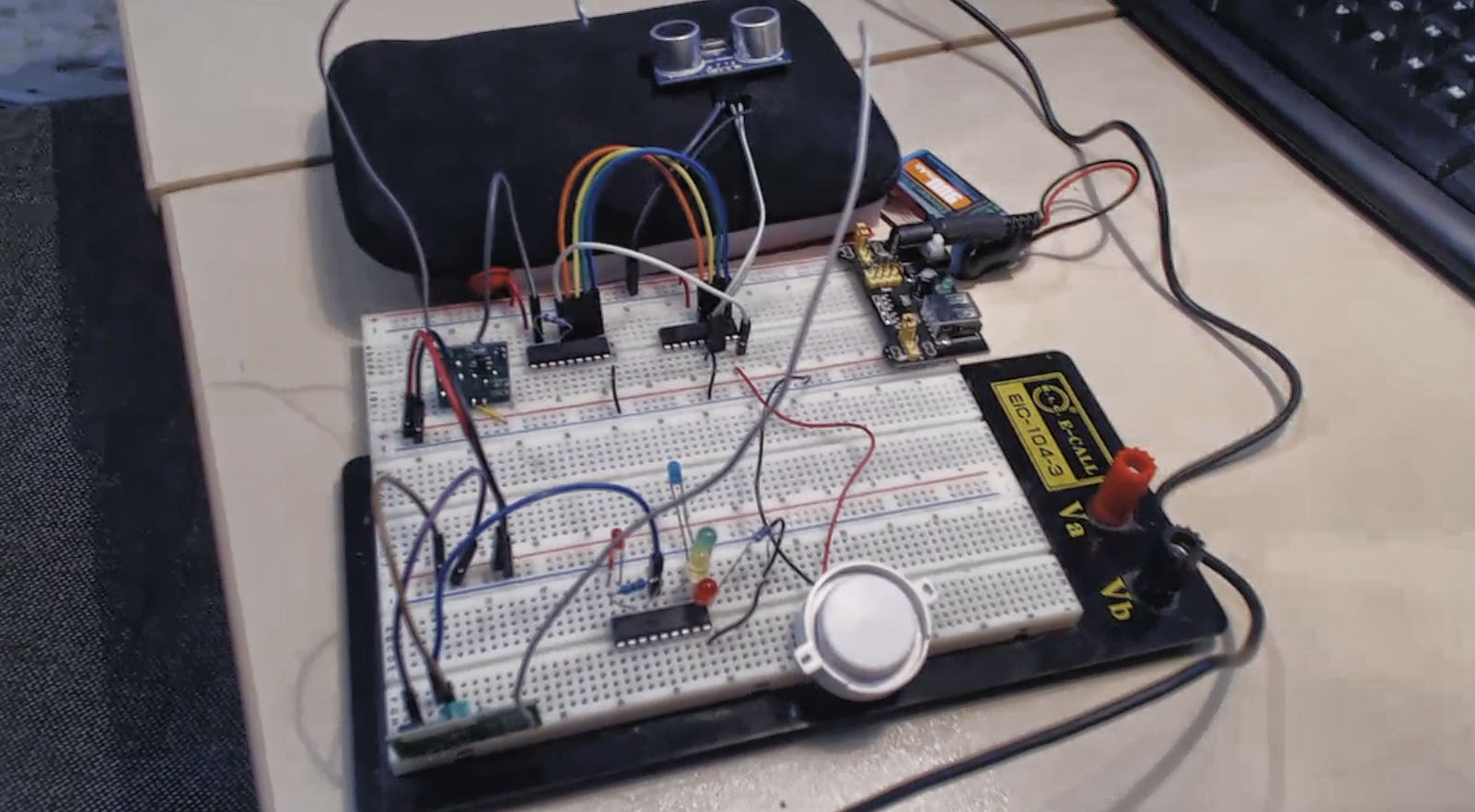
Crear un dispositivo que situado en la parte trasera del coche nos avise por medios visuales y auditivos de la proximidad de objetos.
La práctica se compone de tres fases, en las que se va ampliando el circuito desde un PIC que hace de detector y avisador hasta la comunicación por radiofrecuencia del circuito detector y el avisador con los integrados PT2262-PT2272 y módulos RF
En la zona de descargas se ha incluido un programa PBP y los videos de las tres fases que componen la práctica.
| VIDEO 1: Sensor parking sólo PIC |
| VIDEO 2: Sensor parking PIC + PT2262 |
| VIDEO 3: Sensor parking PIC + PT2262 + Radiofrecuencia |
Componentes necesarios para la realización.
Teoría básica.
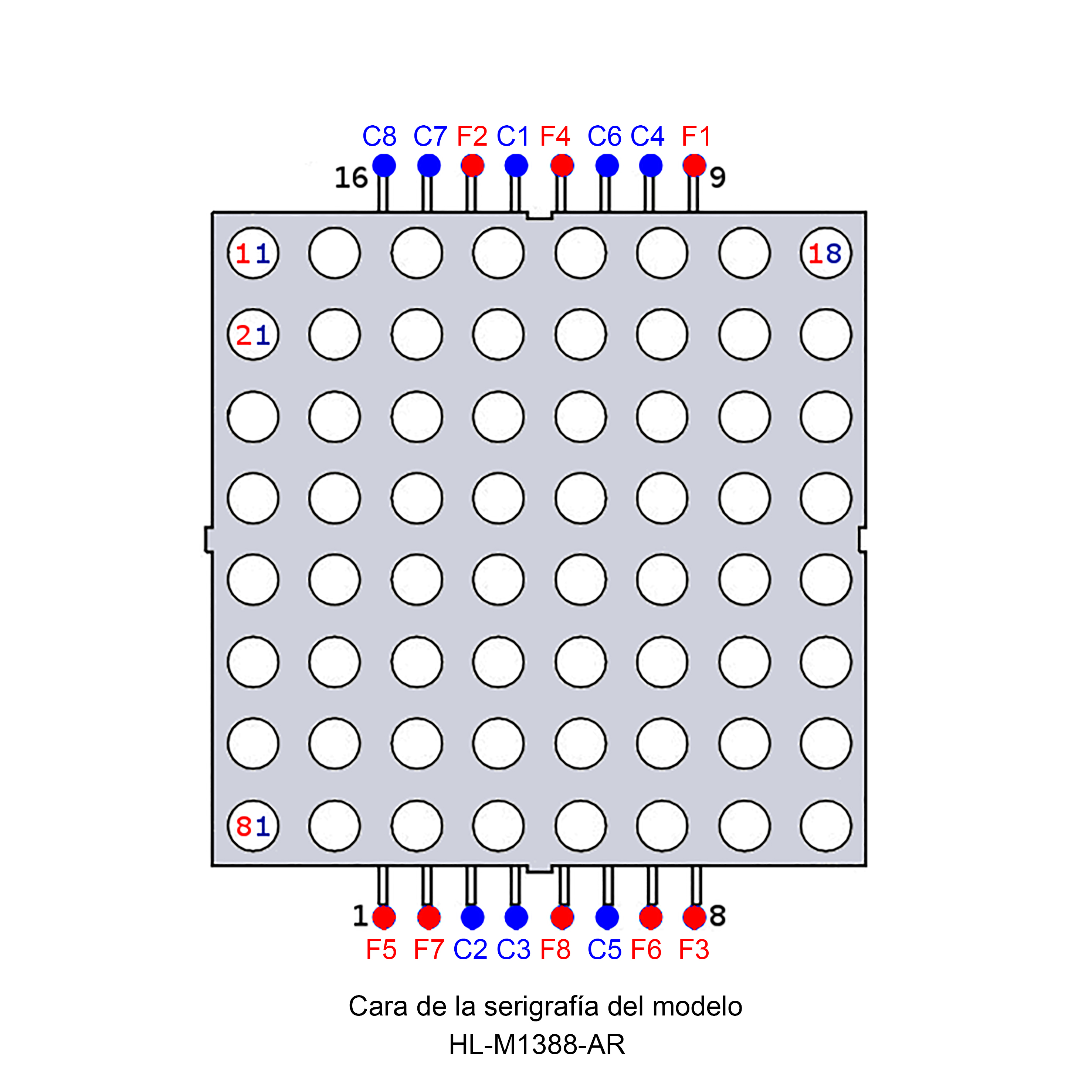
Hacer un programa para hacer dibujos y animaciones en una matriz de led de 8x8.
A falta de matriz de led se hará la simulación en Proteus
Se puede ver el ejemplo del video y el programa de la zona de descargas como referencia.
Se hace uso del generador de caracteres de la página para hacer los dibujos que se representarán.
| VIDEO: Simulación en Proteus de Matriz 8x8 led |